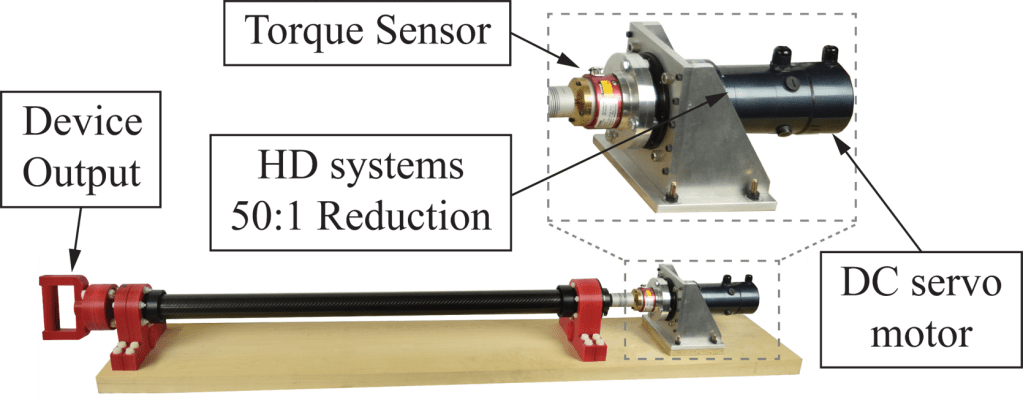
I designed and fabricated a novel MR-compatible admittance-type haptic device. The main challenge of the design was that only non-ferrous materials (e.g. ceramic bearings, 3D-printed parts, plastic fasteners, carbon fiber shaft, ultrasonic motor) could be integrated into the drivetrain. Furthermore, there needed to be a long drivetrain as the user interface would be close to MR bore while the electronics and actuators needed to be far from the bore.